|
I am a Research Scientist at Epic Games, Inc. where I am working on the next generation of photorealistic capture systems. In October of 2024, I graduated with a PhD in Robotics (Computer Science) from The Robotics Institute at Carnegie Mellon University. I was advised by Prof. Chris Atkeson. For my PhD, I worked on systems and algorithms for better perception of small scenes. I am very interested in 3D capture systems and curious about new ideas and hardware that capture interesting aspects of the 3D world around us. If this is interesting to you as well, I'd love to hear from you. In a previous life ...I was a graduate student and then a project staff in the Robotics and Design lab at the department of Mechanical Engineering, IISc Bangalore with Prof. Ashitava Ghosal. I earned my MSc (Engg.) degree at the department of Mechanical Engineering at Indian Institute of Science Bangalore while working with Prof. Ashitava Ghosal on manipulator design. I graduated from the Indian Institute of Engineering Science and Technology, Shibpur with a B.E. degree in Mechanical Engineering in first class with highest honors. For my undergraduate thesis I worked with Prof. Debasis Datta. Email / CV / Google Scholar / LinkedIn / ResearchGate / GitHub |

|
|
Thesis title: Moving Lights and Cameras for Better 3D Perception of Indoor Scenes Executive Summary: We investigate the effects of moving lights and cameras for accurately measuring small 3D scenes. We first look at the effects of moving cameras through a robot mouunted ensembeld of cameras and camera-based tactile sensors for visual servoing and contact Localization. Following this, we look at the effects of moving lights through a robot workspace scaled photometric stereo system and finally, we investigate the effect of jointly moving lights and cameras through a robot mounted multi-flash stereo camera system for ohotorealistic capture of small assets. Slides Document: CMU RI Repository Link [Hi Res: 202 MB] github.com [Low Res: 3.1 MB] |
|
I am interested in the effects of moving lights and cameras for better 3D perception -- specifically in the context of small scenes, human faces etc. |
|
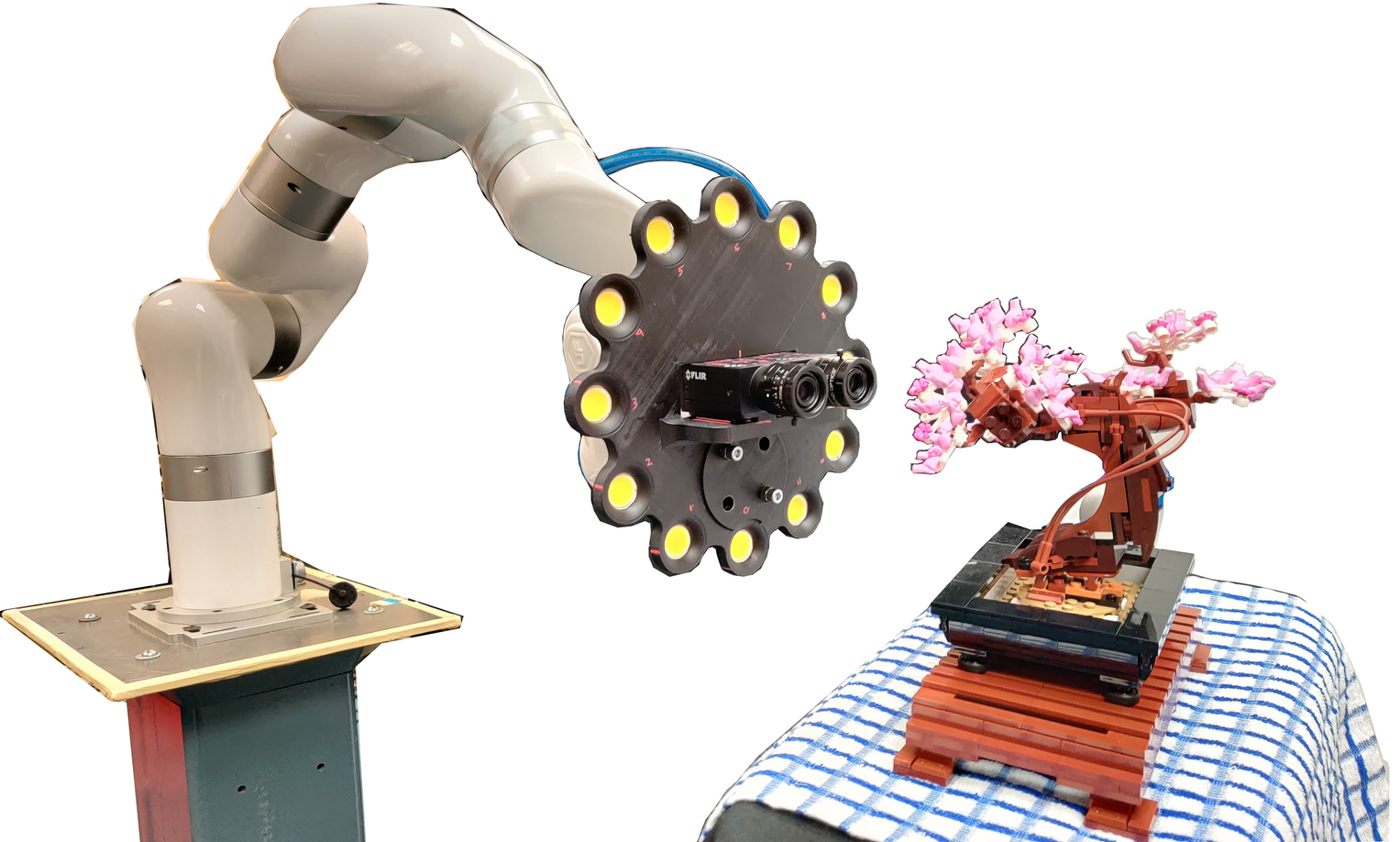
Arkadeep Narayan Chaudhury , Igor Vasiljevic, Sergey Zakharov , Vitor Guizilini , Rares Ambrus , Srinivasa Narasimhan , Christopher Atkeson, SIGGRAPH Asia 2024 Technical Communications and 3DV 2025 Project We demonstrate a robot mounted multi-flash stereo camera for generating photorealistic, portable representations of small scenes. We also investigate the incorporation of dense metric depth from stereo into 3D reconstruction of small scenes. |
|
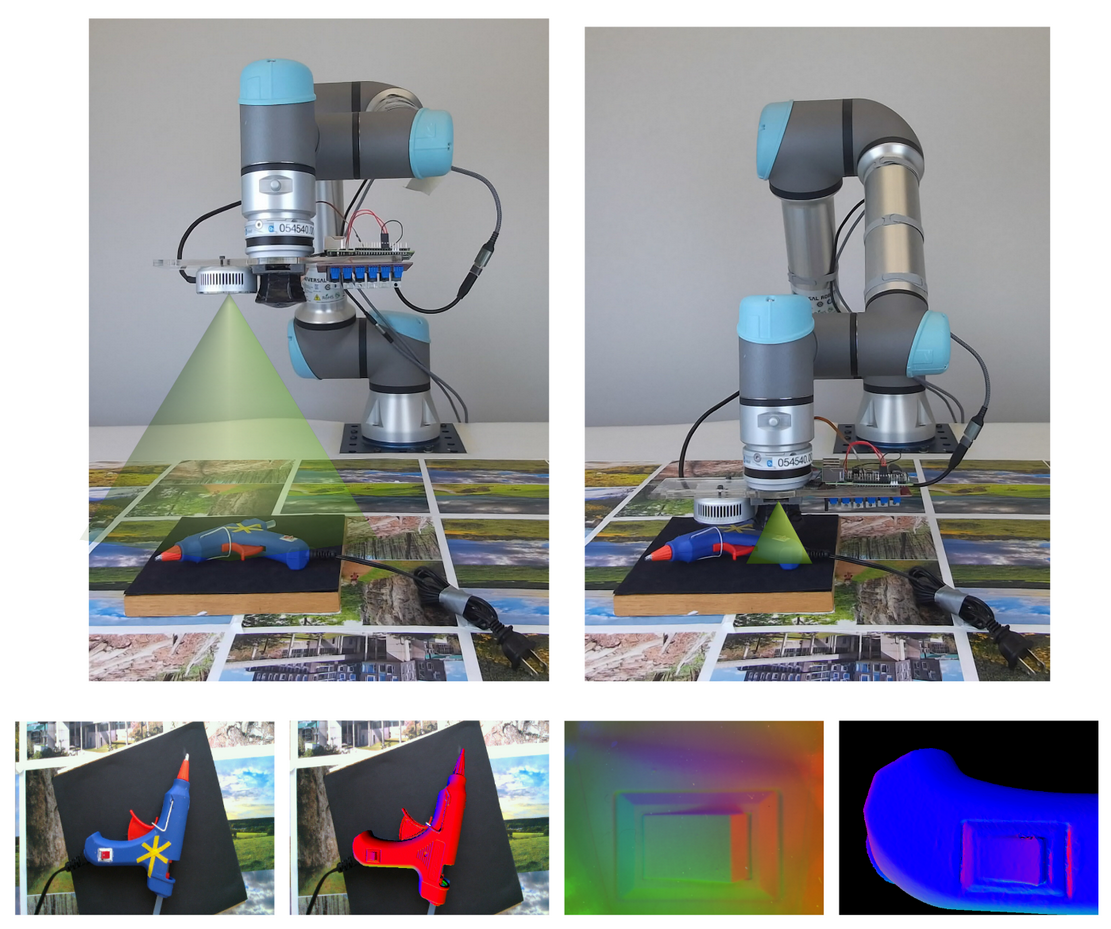
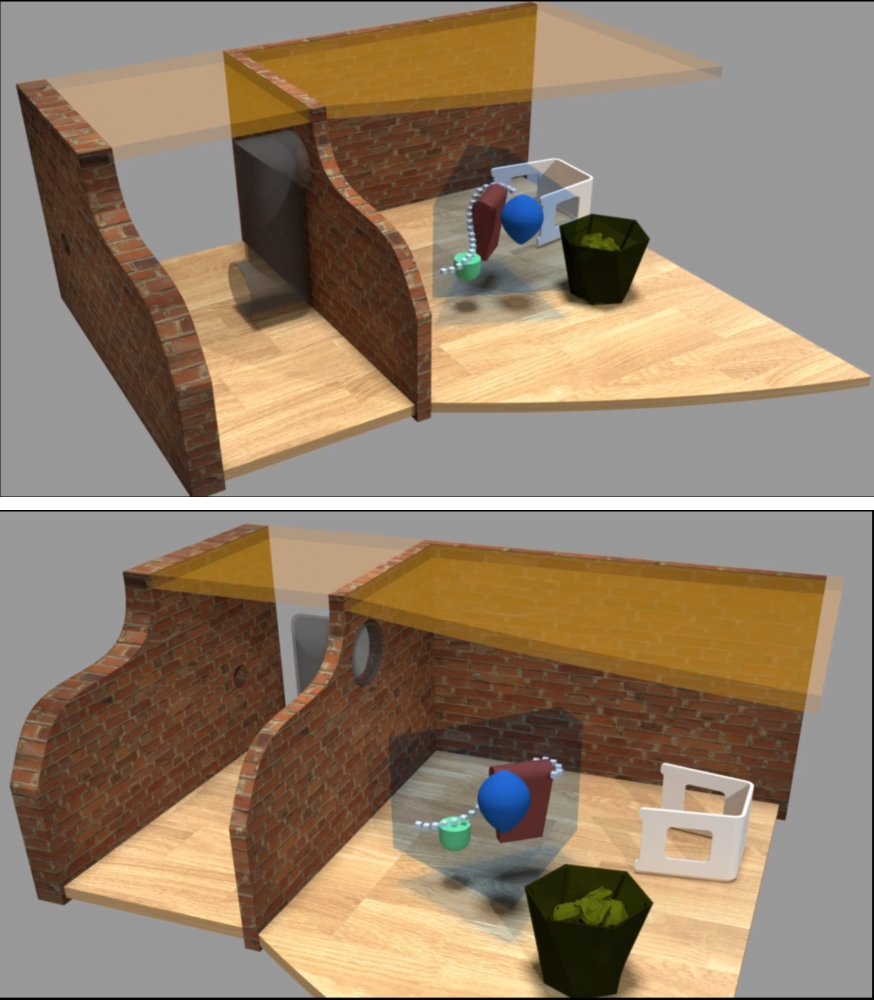
Arkadeep Narayan Chaudhury , Leonid Keselman , Christopher Atkeson, Accepted to WACV '24 Project / In this work we demonstrate a robot workspace scaled controlled illumination setup that generates high quality information for table top scale objects for robotic manipulation. With our low angle of incidence directional illumination setup we can precisely capture surface normals and depth discontinuities of Lambertian objects. We demonstrate three use cases of our setup for robotic manipulation. We show that 1) by using the captured information we can perform general purpose grasping with a single point vacuum gripper, 2) we can visually measure the deformation of known objects and, 3) we can estimate pose of known objects and track unknown objects in the robot's workspace. |
|
Arkadeep Narayan Chaudhury , Timothy Man, Wenzhen Yuan, Chris Atkeson Accepted to the IEEE RA-L Project / Extended Abstract In this work we make the point that coordinating tactile sensing with vision by a co-located camera instead of only consideringthe tactile sensor inputs alone can a) provide useful informationin advance of contact and b) simplify the contact point andpose estimation problem. |
|
In the past I have worked on medical robotics, design of mechanical components and parallel robots. I have also done some research on modelling the human three fingered grasp and on optimal motion planning inside constrained spaces. |
|
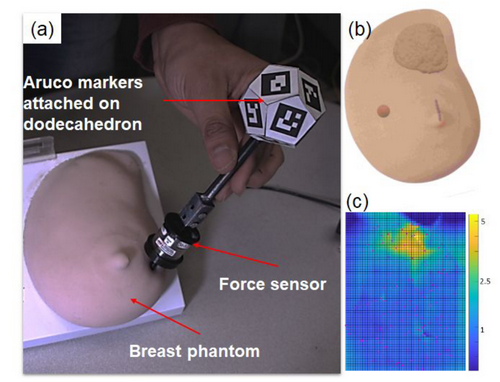
Tejas A. Zodage, Arkadeep Narayan Chaudhury, Arun Srivatsan Rangaprasad, Nicolas Zevallos, Howie Choset Hamlyn Symposium on Medical Rootics, 2019 Paper / Code In this short paper, we describe a new method to generate stiffness maps for soft tissues by fusing a stand alone optical tracking system with an off-the-shelf force sensor. |
|
K. P. Ashwin*, Arkadeep Narayan Chaudhury*, Ashitava Ghosal Computer Aided Design, 2020 , * = equal contribution paper / video 1 / video 2 / video 3 In this paper, we describe an optimization based approach for motion planning of hyper-redundant robots, which results in a natural motion of the links through ducts and onfined spaces. We demonstrate 3 scenarios: (video 1) snake-like robots inspecting an industrial pipeline, (video 2) motion of an endoscopic robot through gastro-intestinal (GI) tract and (video 3) motion of snake-like robots in search and rescue operations. |
|
Arkadeep Narayan Chaudhury, Ashitava Ghosal Mechanism and Machine Theory, 2017 Paper In this work, we use the Monte Carlo method in conjunction with gradient based optimization algorithms to optimally design multi-degree-of-freedom parallel manipulators and closed-loop mechanisms. |

|
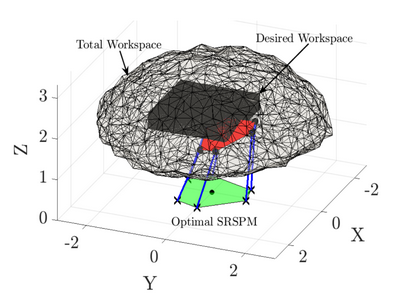
Arkadeep Narayan Chaudhury, Ashitava Ghosal ASME J. Mechanisms Robotics, 2018 Paper Inspired by a multi-jointed human finger and the hand, we propose a six-degree-of-freedom model of a three-fingered robotic hand as a parallel manipulator. We simulate the contact between the fingertips and objects and model the workspace of the human hand. We compare the model with real motion-capture data and show that our method provides a conservative upper bound on the actual workspace. |
|
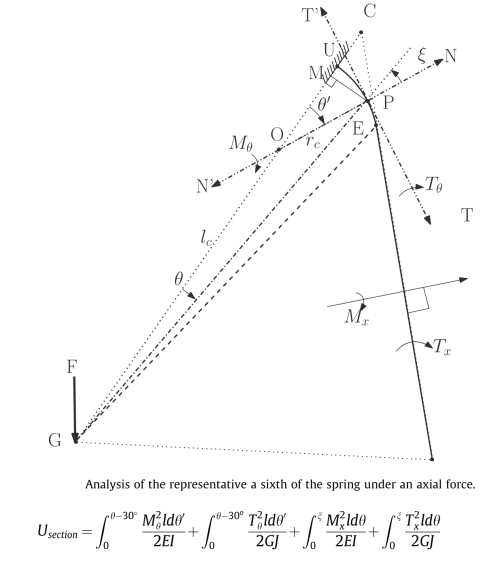
Arkadeep Narayan Chaudhury, Debasis Datta J. Comp. Des. and Engineering , 2017 Paper This paper presents a methodology for designing prismatic springs of non-circular coil shape and non-prismatic springs of circular coil shape using analytical and numerical methods. |
|
Webpage template has been taken from Jon Barron! |